In pilotage it is essential to calculate an accurate Wheel over Position. Normally this is done by plotting the appropriate Transfer and Advance for each turn. However manoeuvring data for merchant ships is usually confined to the minimum IMO requirements (hard to port or starboard with full rudder at maximum manoeuvring speed).

Therefore we approximate these data by using the Turning Circle Diameter which is, depending on the vessel, 3 tot 5 times the length of the vessel and the delay it takes the vessel to start the turn, usally a couple of minutes. SOLAS and IMO require that allowance should be made for any significant predicted Tidal Stream. The vessel will inevitably loses speed in turns, the amount depends on how much rudder is applied. Allowance should be made for this loss of speed.
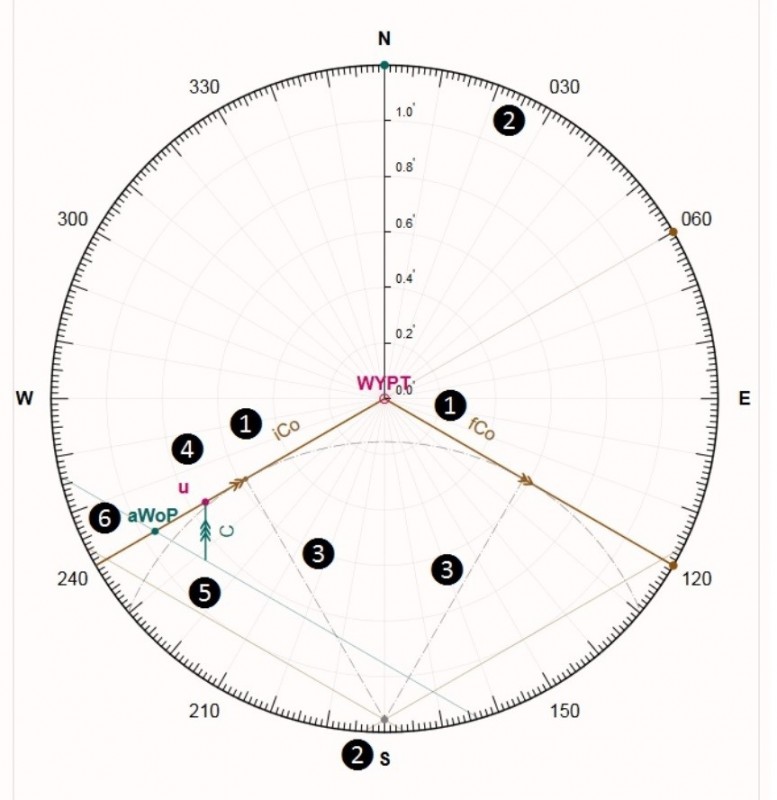
1. Draw the initial and final intended courses, with at the intersection the Waypoint (WYPT)
2. Draw lines parallel to the initial and final courses at a distance that is half the Turning Circle Diameter. The Centre of the Turning Circle is at the intersection of these parallel lines
3. From the Centre of the Turning Circle draw perpendicular lines, to the initial an final course lines. The point were the perpendicular line intersects the final course line is where the vessel will resume its final course
4. From the point where the perpendicular line intersects the initial course line, lay off the distance the vessel travels before it starts to turn. This reaction time is due to the inertia of the ship and depends among other things on her speed. This point is the unadjusted Wheel over Point
5. At the unadjusted Wheel over Point (u) plot the Tidal vector back. The length of the tidal vector is determined by the time of the turn
6. To find the adjusted Wheel over Point (aWoP) project the end of the Tidal vector to the initial course line parallel to final course line